EVA Release v2.6

EVA v2.6: 상황을 더 깊이 이해하고, 운영 판단을 더 분명하게
EVA v2.6은 '탐지 결과를 어떻게 해석하고, 어떤 알림에 먼저 대응할 것인가'라는 운영자의 실제 고민에서 출발한 릴리즈입니다. 정확한 탐지 성능 개선이 기본이 된 지금, 현장에서는 "이 알림이 정말 중요한가?", "지금 바로 대응해야 하는 상황인가?"와 같은 운영 판단의 명확성이 더 중요해지고 있습니다. 이번 v2.6 업데이트는 AI가 무엇을 보느냐를 넘어, 운영자가 그 결과를 어떻게 이해하고 활용하느냐에 초점을 맞췄습니다.
- 알림이 많아질수록 더 중요해지는 우선순위 판단 기준
- 탐지 결과를 '사건'이 아닌 운영 지표로 축적하는 구조
- 한 장의 이미지가 아닌 상황의 흐름을 이해하는 탐지
- 모든 시나리오를 동일하게 처리하지 않는 선택 가능한 탐지 프로세스
v2.6은 EVA를 단순한 탐지 시스템이 아닌, 운영자의 판단을 돕는 AI 운영 플랫폼으로 한 단계 확장하는 릴리즈입니다.
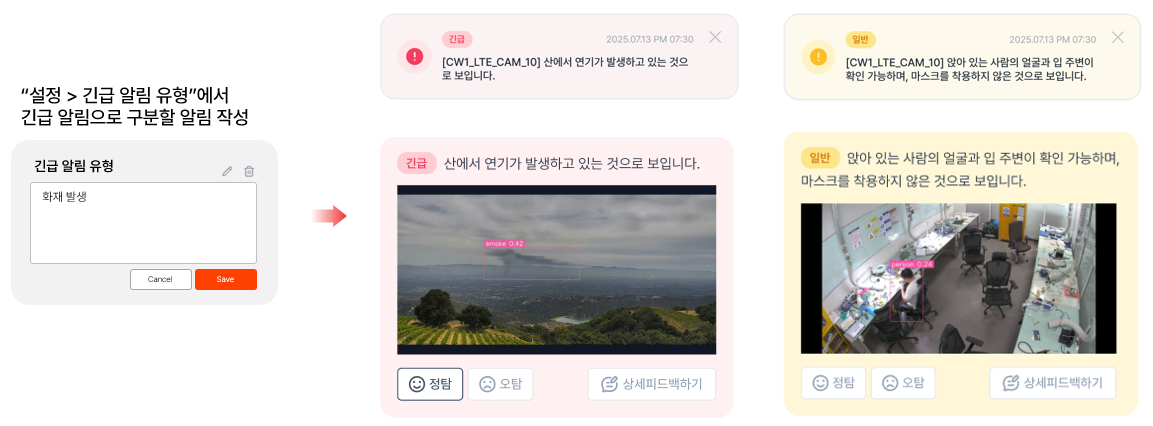
긴급 알림 설정: 놓치지 말아야 할 알림을 더 분명하게
시나리오가 늘어날수록, 알림의 양도 함께 증가합니다. 이때 모든 알림이 동일한 중요도로 표시된다면, 운영자는 다시 한 번 ‘사람의 판단’으로 우선순위를 정해야 합니다. 이러한 부담을 줄이기 위해 긴급 대응이 필요한 알림 유형을 텍스트로 정의할 수 있는 기능을 추가했습니다. 긴급 알림으로 지정된 탐지는 일반 알림과 명확히 구분되어 표시되며, 운영자는 다수의 알림 속에서도 반드시 먼저 확인해야 할 상황을 즉시 인지할 수 있습니다. 알림이 많아질수록 중요한 것은 ‘알림의 개수’가 아니라 어떤 알림에 먼저 반응해야 하는가입니다. v2.6의 긴급 알림 설정은 운영 판단의 기준을 더욱 명확하게 만들어 줍니다.
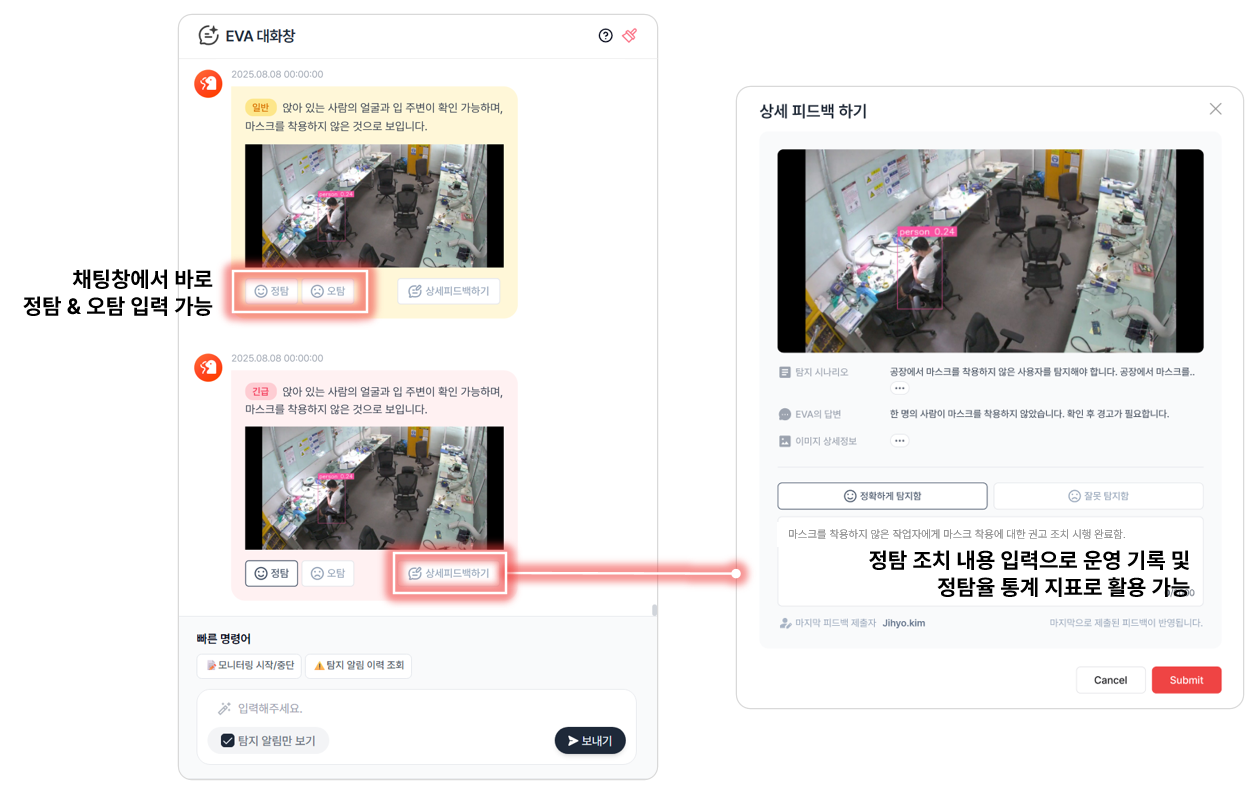
오탐·정탐 피드백 확장 : 탐지 결과에 대한 피드백 ‘운영 기록’ 그리고 ‘지표’로 관리합니다
기존에는 오탐에 대해서만 피드백을 남길 수 있었다면, v2.6에서는 정탐에 대해서도 피드백 입력이 가능해졌습니다. 운영자는 각 탐지 결과에 대해 오탐/정탐 여부를 명확히 남�길 수 있고, 이 데이터는 시나리오별 정탐율 지표로 누적·관리됩니다. 이를 통해 탐지 결과는 단순한 이벤트 로그가 아니라, 운영 품질을 평가하고 개선하는 정량적 데이터로 활용됩니다.
또한 피드백 이력은 어떤 알림이 실제로 확인되었는지 어떤 판단과 대응이 이루어졌는지를 함께 추적할 수 있는 운영 기록으로 기능합니다. UI 측면에서도 개선이 이루어져, 채팅창에서 탐지 알림 목록을 확인할 때 상세 페이지에 들어가지 않아도 피드백 입력 여부를 즉시 확인할 수 있습니다.
메인 화면 개선: 운영에 꼭 필요한 정보만 더 직관적으로
메인 화면은 운영자가 가장 자주 마주하는 공간입니다. v2.6에서는 실제 운영 흐름을 기준으로 리스트 구성을 재정비했습니다. 모델명·탐지 대상과 같이 즉각적인 판단에 기여도가 낮은 정보는 제거하고, 대신 알림 심각도, 최근 알림 요약, 탐지 시나리오 요약, 웹훅 설정 여부와 같은 운영 중심 정보로 컬럼을 재구성했습니다. 이를 통해 운영자는 “지금 어떤 상황이 발생했고, 무엇을 해야 하는지”를 한눈에 파악하고 빠르게 대응할 수 있습니다.

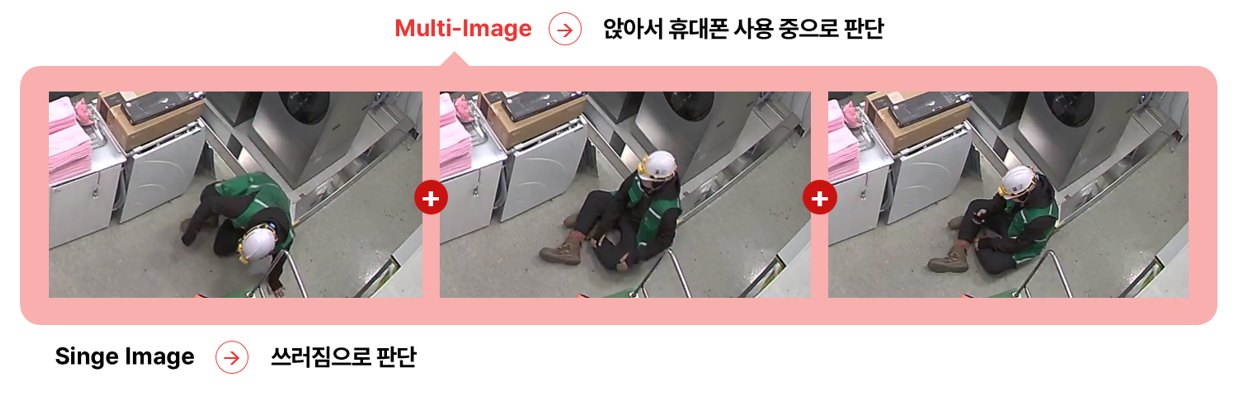
멀티 이미지 기반 탐지: 탐지 상황을 이미지 한 장이 아닌, 흐름으로 이해합니다
현장의 상황은 대부분 정적인 순간이 아니라, 연속적인 변화 속에서 발생합니다. 기존의 단일 이미지 기반 탐지는 한 순간의 상태만을 기준으로 판단하기 때문에, 동작의 전후 맥락이 중요한 시나리오에서는 한계가 존재했습니다.
예를 들어 헬스장에서 사람이 바닥에 누워 있는 장면은, 운동 중 스트레칭이나 휴식일 수도 있고 실제로 쓰러진 응급 상황일 수도 있습니다.
이 차이는 앞뒤 장면을 함께 보지 않으면 구분하기 어렵습니다. v2.6에서는 이러한 한계를 개선하기 위해 멀티 이미지 기반 탐지를 도입했습니다. 연속된 여러 장의 이미지를 함께 분석하여, 동작의 흐름과 상태 변화를 종합적으로 판단합니다. 이를 통해 월담, 폭행, 쓰러짐과 같이 행동의 ‘과정’ 자체가 중요한 시나리오에서 탐지 정확도가 크게 향상됩니다.
EVA는 더 이상 단편적인 순간에 반응하지 않고, 상황이 어떻게 진행되고 있는지를 이해하는 방식으로 진화하고 있습니다.
💡 멀티 이미지 기반 탐지의 기술적 설계와 판단 방식에 대한 상세 내용은 Tech Blog에서 확인하실 수 있습니다.
→ Tech Blog | Multi-Frame 기반 VLM 탐지: 단일 이미지 한계를 넘어 시간적 맥락으로
VM Only 탐지: 객체 감지만으로, 더 빠른 알림이 필요할 때
모든 탐지가 복잡한 시나리오 해석을 필요로 하지는 않습니다. 어떤 환경에서는 “특정 객체가 보였는가” 자체가 곧바로 의미가 되기도 합니다.
기존 EVA는 Vision Model(VM) → Vision Language Model(VLM) 단계를 거쳐 객체 감지 이후 시나리오 해석까지 수행하는 구조였습니다. 이 방식은 복합적인 판단에는 효과적이지만, 단순 조건의 시나리오에서는 불필요한 지연이 발생할 수 있었습니다.
v2.6에서는 이를 보완하기 위해 VM Only 탐지 프로세스를 새롭게 제공합니다. 객체가 감지되는 즉시 알림을 발생시키는 방식으로, VLM 단계를 거치지 않고 탐지 속도와 자원 효율을 동시에 개선합니다.
예를 들어, “앰뷸런스가 보이면 알려줘”과 같은 시나리오에서는 복잡한 해석 없이 객체 탐지 만으로 더 빠른 ��대응이 가능해집니다. 운영자는 이제 시나리오의 성격에 따라 ‘정확한 해석’이 중요한 경우와 ‘빠른 반응’이 중요한 경우를 구분하여 탐지 방식을 선택할 수 있습니다.
EVA는 단순히 알림을 발생시키는 시스템이 아니라,
운영자의 판단과 경험이 함께 축적되는 AI 운영 플랫폼을 지향합니다.
v2.6은 그 방향성을 가장 분명하게 드러내는 릴리즈입니다.
탐지 정확도는 물론, 운영 판단의 흐름과 우선순위, 기록과 지표까지 함께 개선했습니다.
앞으로도 EVA는 복잡한 현장 상황을 더 잘 이해하고, 운영자가 더 빠르고 명확하게 의사결정을 내릴 수 있도록 진화해 나가겠습니다.
여러분의 사용 경험과 피드백은 EVA를 한 단계 더 성장시키는 가장 중요한 기반입니다.
🚀Coming Soon: v2.7 미리 보기
- 탐지 시나리오 기반 자동 설정
- 다각형 탐지 영역 설정
- 탐지 시나리오/대상 변경 이력 알림

