
지게차 위험 상황 집중 관리
지능형 시나리오 탐지를 통해 지게차 작업 현장의 보행자 충돌 등 중대 재해를 예방합니다.
지게차 위험은 늘 보였지만, 사고는 막지 못했습니다
제조 현장에서 지게차는 가장 익숙한 장비 중 하나입니다. 원자재를 옮기고, 적재물을 이동시키고, 공정을 멈추지 않게 만드는 핵심 수단이죠.
EVA는 바로 그 지점에서 출발했습니다. 감시 화면 속에는 '사람'이 보이지만, 위험은 언제나 그 이면에서 조용히 자랍니다. 지게차 케이스는 EVA가 그 질문에 어떻게 답했는지를 보여주는 사례입니다.
도입 배경: 위험은 늘 화면 안에 있었지만, 대응은 늘 한발 늦었습니다
지게차 사고*는 대부분 거창한 이상 상황에서만 발생하지 않습니다. 오히려 현장에서는 너무 익숙해서 ��그냥 지나치기 쉬운 장면들 속에서 시작됩니다. 적재물을 높이 실은 지게차가 시야 확보가 어려운 상태로 이동하고, 운전자는 잠시 안전모를 벗은 채 탑승하며, 작업자는 바쁜 와중에 동선을 조금 줄이기 위해 지게차 작업 반경 가까이 들어옵니다.
이 모든 장면은 CCTV 화면에 잡힙니다. 하지만 보인다고 해서, 곧바로 대응할 수 있는 것은 아니었습니다. 현장의 관제 담당자는 수십 개 화면을 동시에 봐야 했고, 그 안에서 “사람이 있다”, “지게차가 지나간다”는 사실보다 더 중요한 “지금 이 조합이 실제 위험한 상황인가”를 즉시 판단해야 했습니다.
문제는 여기 있었습니다. 기존 CCTV는 장면을 기록할 수는 있어도, 사람과 장비의 위치 관계, 이동 방향, 작업 맥락이 겹쳐 만들어지는 위험의 순간까지 읽어내지는 못했습니다. 결국 현장에 부족했던 것은 카메라가 아니라, 복잡한 움직임 속에서 개입이 필요한 위험을 선별해 주는 판단 체계였습니다.
*지게차는 국내 산업 현장에서 사망 사고를 가장 많이 일으키는 기인물 1위(고용노동부 통계 기준)
해결의 실마리: EVA는 ‘객체’를 보는 것이 아니라, 현장의 위험 맥락을 읽으려 했습니다
EVA 팀은 이 문제를 단순한 영상 인식 과제로 보지 않았습니다. 지게차 사고의 본질은 화면 속에 사람이 있고 장비가 있다는 사실이 아니라, 복잡하게 얽힌 움직임 속에서 언제 위험이 발생하는지를 실시간으로 읽어내기 어렵다는 데 있었기 때문입니다.
그래서 EVA 팀은 답을 책상 위가 아니라 현장에서 찾았습니다. 공장의 소음, 지게차의 이동 궤적, 작업자의 동선, 순간적인 진입과 이�탈까지 직접 관찰하며, VLM이 이해해야 할 ‘현장의 언어’를 하나씩 정리해 나갔습니다. 현장에서는 비슷해 보이는 장면도 어떤 움직임은 일상적인 작업 흐름이고, 어떤 움직임은 즉시 개입이 필요한 위험 신호였습니다. EVA는 바로 그 차이를 구분할 수 있어야 했습니다.
시중에는 사물이나 사람을 인식하는 AI는 많습니다. 하지만 EVA가 풀고자 한 문제는 단순한 객체 인식이 아니었습니다. 중요한 것은 무엇이 보이느냐가 아니라, 그 장면이 어떤 위험 맥락을 만들고 있느냐였습니다. 이를 위해 EVA는 맥락 이해 기반의 시나리오 탐지 방식으로 접근했습니다. 예를 들어 단순히 사람을 찾는 것이 아니라, 적재물로 시야가 가려진 지게차 주변으로 작업자가 접근하는 상황, 지게차 전용 구역 안으로 보행자가 진입하는 상황, 안전모 미착용 상태에서 위험 반경 안으로 들어오는 상황처럼 실제 사고 가능성을 높이는 장면 조합을 하나의 위험 시나리오로 읽어내도록 설계했습니다.
여기서 EVA의 강점은 탐지에서 끝나지 않는다는 점입니다. EVA는 위험을 인식한 뒤, 이를 현장의 실제 대응으로 연결할 수 있도록 경광등, 스피커, 지게차 인터록과 같은 Physical Action Trigger와 연동 가능한 구조를 갖추고 있습니다. 즉, “위험하다”는 판단을 기록으로 남기는 데 그치지 않고, 그 순간 곧바로 현장에 경고를 주고 필요한 물리적 제어로 이어질 수 있는 기반까지 함께 제공하는 것입니다.
문제 해결의 과정: 실제 사고 가능성이 높은 장면을, 현장 기준으로 다시 정의했습니다
PoC 과정에서 EVA 팀이 먼저 한 일은, 현장에서 반복적으로 발생하는 위험 장면�을 다시 정의하는 것이었습니다. 문제는 “지게차가 있다”는 사실이 아니라, 언제 그 지게차가 실제 위험이 되는가였기 때문입니다.
그래서 EVA는 현장과 함께 사고 가능성이 높은 상황을 하나씩 구체적인 시나리오로 정리했습니다. 적재물을 높게 실은 채 이동하거나 회전하는 경우, 지게차 작업 반경 안으로 보행자나 작업자가 진입하는 경우, 하역 중 운전기사가 지정 대기 장소를 벗어나는 경우처럼 실제 현장에서 놓치기 쉬운 장면들을 위험 기준으로 구조화했습니다.
이후에는 이 시나리오들이 실제 CCTV 환경에서도 안정적으로 탐지되도록 조정이 이어졌습니다. 현장마다 카메라 높이와 각도, 조명, 동선의 복잡도가 모두 달랐기 때문에, 같은 상황도 영상 안에서는 전혀 다르게 보일 수 있었기 때문입니다. EVA 팀은 이런 차이를 반영해, AI가 단순히 객체를 인식하는 수준이 아니라 사람과 지게차의 위치 관계, 이동 방향, 접근 반경까지 함께 읽을 수 있도록 시나리오를 정교하게 튜닝했습니다.
PoC가 증명한 가능성: 사고는 이제 어쩔 수 없는 일이 아니라, 통제 가능한 데이터입니다
PoC 결과는 분명했습니다. 그동안 현장에서는 “정신없이 일하다 보면 어쩔 수 없다”고 여겨졌던 지게차 주변의 위험 상황들이, EVA의 지능형 시야를 통해 예측 가능하고 관리 가능한 영역으로 들어오기 시작했습니다.
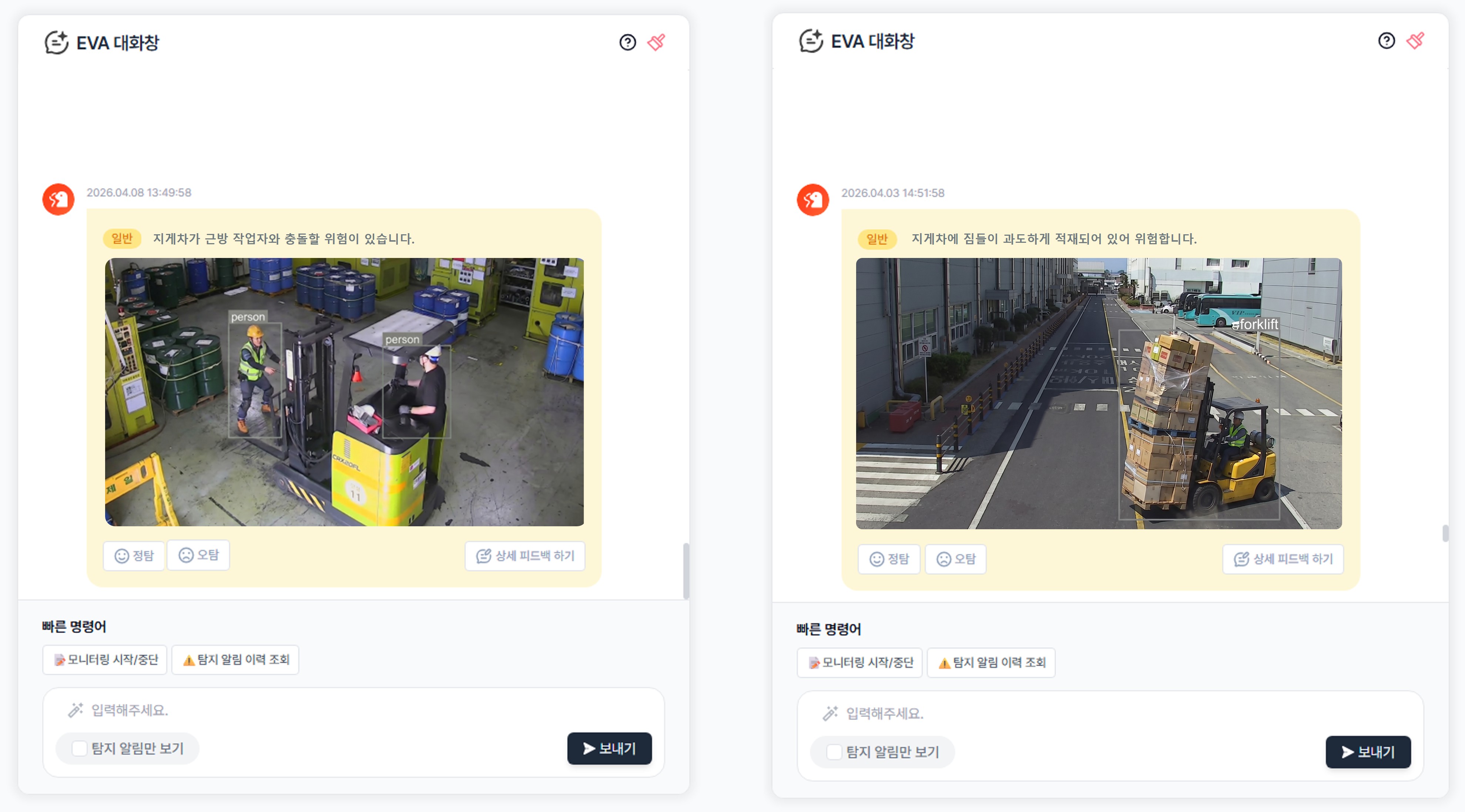
실제 테스트 과정에서 EVA는 지게차끼리 과도하게 근접해 교행하는 순간이나, 보행자가 지게차 전용 구역에 진입하는 찰나를 포착해 즉시 알람을 제공했습니다. 이를 통해 담당자들은 더 이상 무작정 여러 화면을 훑으며 위험을 찾아내는 방식에 의존하지 않고, EVA가 알려주는 위험 임계점 데이터를 중심으로 보다 선제적인 안전 관리를 수행할 수 있었습니다.
무엇보다 의미 있었던 변화는 현장의 반응이었습니다. 작업자들은 AI가 실시간으로 안전모 착용 여부와 작업 구역 준수 상태를 확인하고, 위험 상황에 즉각 반응한다는 사실을 체감하게 되었습니다. 그 결과, 단순한 감시를 넘어 스스로 안전 수칙을 지키게 만드는 현장 내 행동 변화와 선순환 구조가 만들어지기 시작했습니다.
지게차 위험, 아직도 사람의 눈과 운에 맡기고 있나요?
현장의 위험은 늘 화면 안에 있습니다. 하지만 그 장면이 정말 위험한지, 지금 개입해야 하는지까지 사람이 모든 화면에서 실시간으로 판단하기는 어렵습니다.
EVA는 지게차와 작업자가 뒤섞인 복잡한 제조 현장에서 위험의 맥락을 읽고, 개입이 필요한 순간을 먼저 알려주는 실천적 AI입니다.
기록만 남기는 CCTV를 넘어, 현장을 실제로 지키는 안전 체계가 필요하다면 EVA의 PoC 사례와 데모를 통해 당신의 현장에 맞는 ‘작동하는 안전’을 설계해 보세요.

