
글로벌 제조 캠퍼스 지능형 안전 환경
초대형 사업장의 안전 관제 패러다임을 바꾸는 유연한 지능형 안전 대응 체계
글로벌 제조 캠퍼스 지능형 안전 대응 체계 구축
글로벌 제조 캠퍼스는 작업자의 안전 확보와 위험 상황에 대한 신속한 대응을 위해 EVA를 도입했습니다.
기존 AI CCTV는 사전에 정의된 제한적인 시나리오 중심으로 동작하여, 현장에서 발생하는 다양한 변수와 신규 위험 상황에 유연하게 대응하기 어려운 구조였습니다.
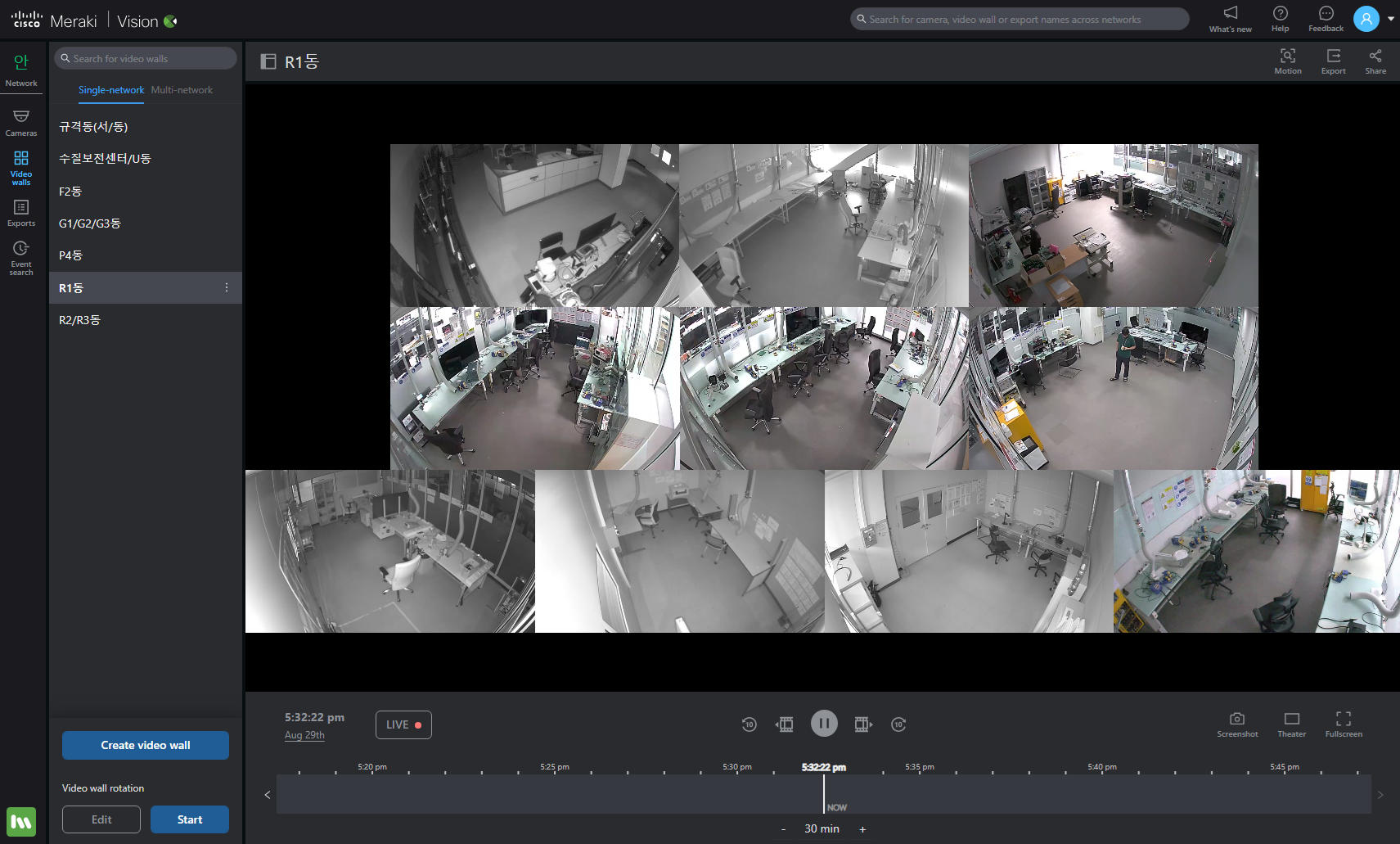
EVA x 글로벌 스마트 카메라 : 지능형 안전 환경 구현
글로벌 파트너사의 스마트 카메라 인프라와 EVA를 결합하여 지능형 안전 관제 환경을 구축했습니다.
안전 관리자는 복잡한 설정이나 개발 없이, 카메라를 간편하게 추가하�고 자연어로 탐지 시나리오를 작성할 수 있습니다.
이를 통해 현장의 변화에 맞춰 시스템이 즉각적으로 대응할 수 있는 실무 중심의 운영 환경을 마련했습니다.
실시간 대응에 집중한 유연한 안전 체계
주요 탐지 대상
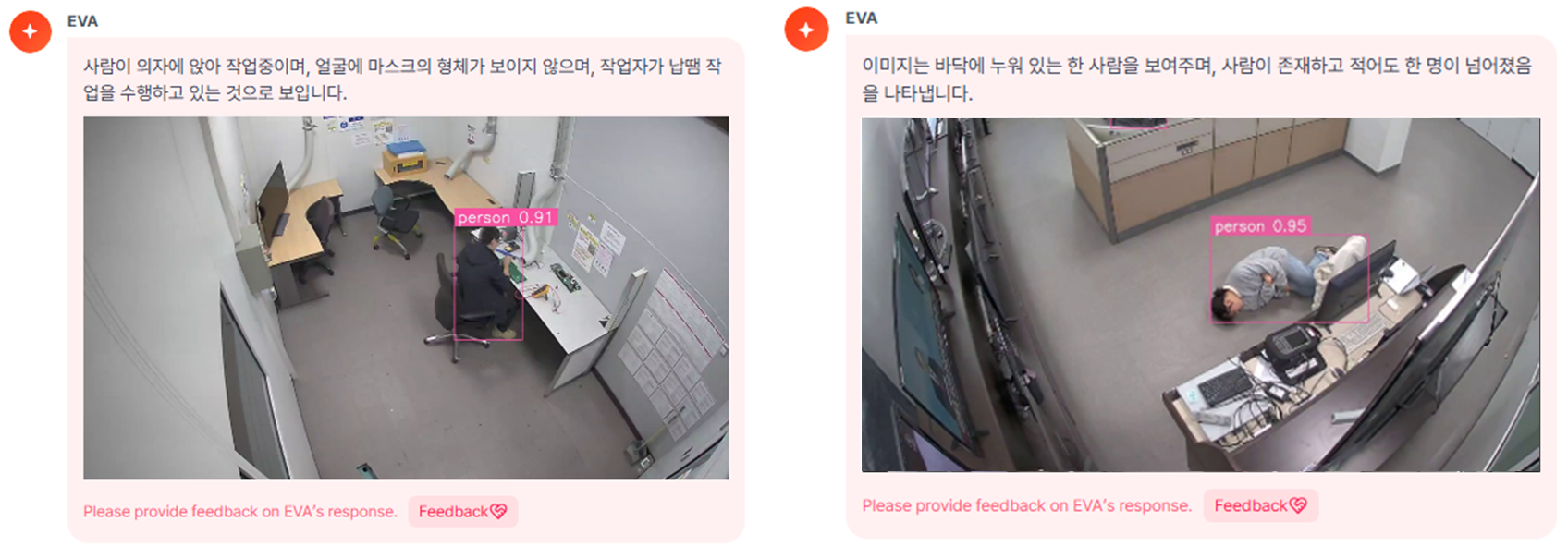
유해 물질 취급 기준에 따른 상시 보호구 착용 여부(마스크, 헬멧 등)를 지속적으로 모니터링합니다.
또한 24시간 교대 근무 환경과 나홀로 작업장 등에서 발생할 수 있는 쓰러짐, 장시간 방치 등 이상 상황을 실시간으로 감지합니다.
주요 활동 케이스
EVA 도입 초기에는 실제 작업 현장의 복잡성으로 인해 다양한 오탐이 발생할 수 있습니다.
하지만 현장 관리자가 이를 설명하고 피드백을 제공하면, EVA는 이를 바탕으로 점진적으로 판단 기준을 정교화합니다.
이 과정에서 탐지 정확도는 지속적으로 향상됩니다.
아래는 이러한 개선 과정을 이끌어낸 대표적인 세 가지 활동들을 소개합니다.
Activity 1 : 탐지 시나리오 고도화
| Case | 1단계 (초기) | 2단계 (오탐 상황 설명) | 3단계 (Enrich Agent 구조화) |
|---|---|---|---|
| 쓰러짐 탐지 | 사람이 쓰러지면 알려줘. | 바닥에 사람이 쓰러져 있는 경우만 알리고, 의자에 앉아 있거나 서 있는 사람은 제외해줘. | 현재 사례 바닥에 사람��이 쓰러져 있는 상황 탐지 탐지 단계 - 사람 존재 여부 - 최소 1명 이상 바닥에 쓰러진 상태 예외 사례 - 의자에 앉아 있거나 서 있는 경우 - 신체 식별이 어려운 경우 - 단순 취침과 구분이 어려운 경우 - 신체 50% 이상 가려진 경우 - 바닥 물체나 구조물에 가려진 경우 |
| 마스크 미착용 | 마스크 안 쓴 사람 알림 줘. | 의자에 앉아 업무 중인 사람 중에서만 마스크 안 쓴 사람 알려줘. 노트북/폰 사용자는 제외. | 현재 사례 의자에 앉아 일하는 사람의 마스크 미착용 탐지 탐지 단계 - 의자에 앉아 있음 - 업무 중(행위 판단) - 얼굴에 마스크 미착용 예외 사례 - 업무 행위 판단이 어려운 경우 - 얼굴이나 착용 물품이 가려진 경우 |
단순한 조건 나열은 실제 현장의 복잡함을 반영하기 어렵습니다.
EVA는 사용자의 설명과 예외 상황을 단계별로 구조화하여,
AI가 '무엇을 봐야 하는지'뿐만 아니라 '무엇을 보지 말아야 하는지'를 이해하도록 합니다.
이 역할을 수행하는 Enrich Agent는 시나리오 완성도를 높이는 핵심 요소입니다.
Activity 1 : 오탐 알람에 대한 피드백
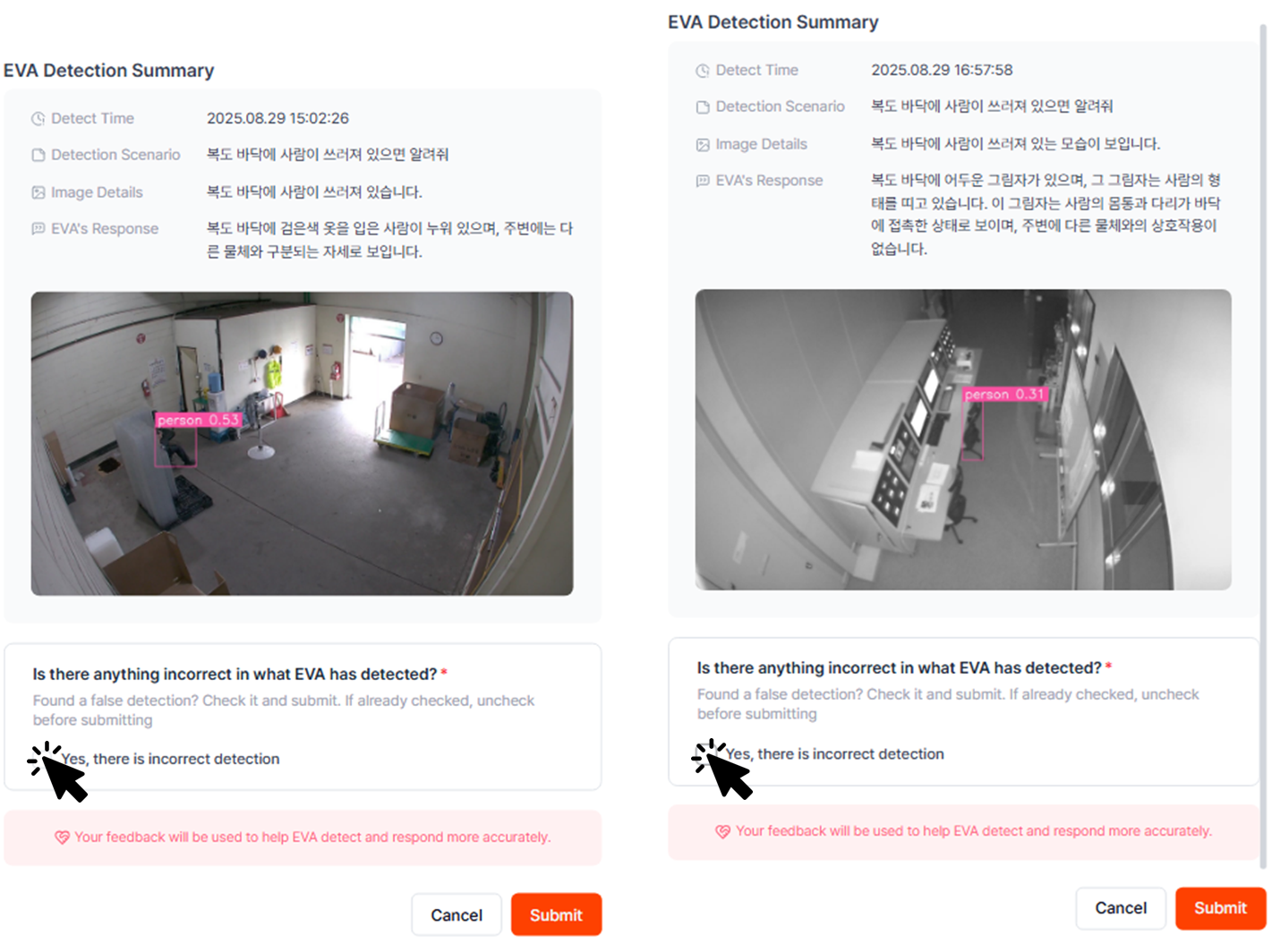
사용자가 오탐 발생 시 제공하는 피드백은 VectorDB에 저장되어,
유사한 상황에서 동일한 알람이 반복되는 것�을 방지합니다.
250회 이상의 누적 피드백을 통해 EVA는 현장의 특성을 학습하고 판단 기준을 지속적으로 다듬어 나갑니다.
이러한 피드백 루프는 운영이 지속될수록 시스템의 신뢰도를 높이는 중요한 메커니즘입니다.
Activity 2 : Foundation Model 업데이트
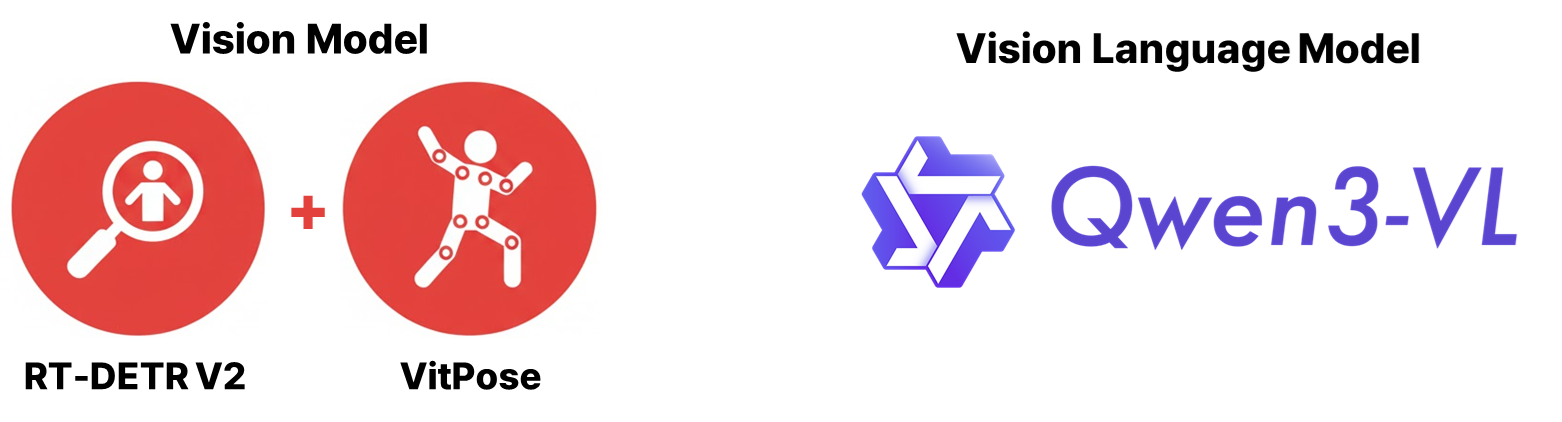
EVA는 특정 모델에 종속되지 않고,
현장 특성과 운영 목적에 맞춰 다양한 Vision Model을 유연하게 조합하거나 최신 LLM/VLM 모델로 전환할 수 있습니다.
이번 사례에서는 RT-DETR V2를 활용해 사람 객체를 빠르게 탐지하고,
VitPose와 결합하여 실제 자세를 검증함으로써 오탐률을 획기적으로 낮췄습니다.
기술적 상세 내용은 Tech Blog에서 보실 수 있습니다.
더 나아가, 새롭게 출시된 다양한 VLM 모델을 검증하여 Qwen3-VL 8B로 업데이트함으로써 전체적인 탐지 성능을 높였고,
경량화된 모델 구성을 통해 처리 속도를 50% 향상시켰습니다.
Activity 3 : 영역 기반 탐지 (Area)
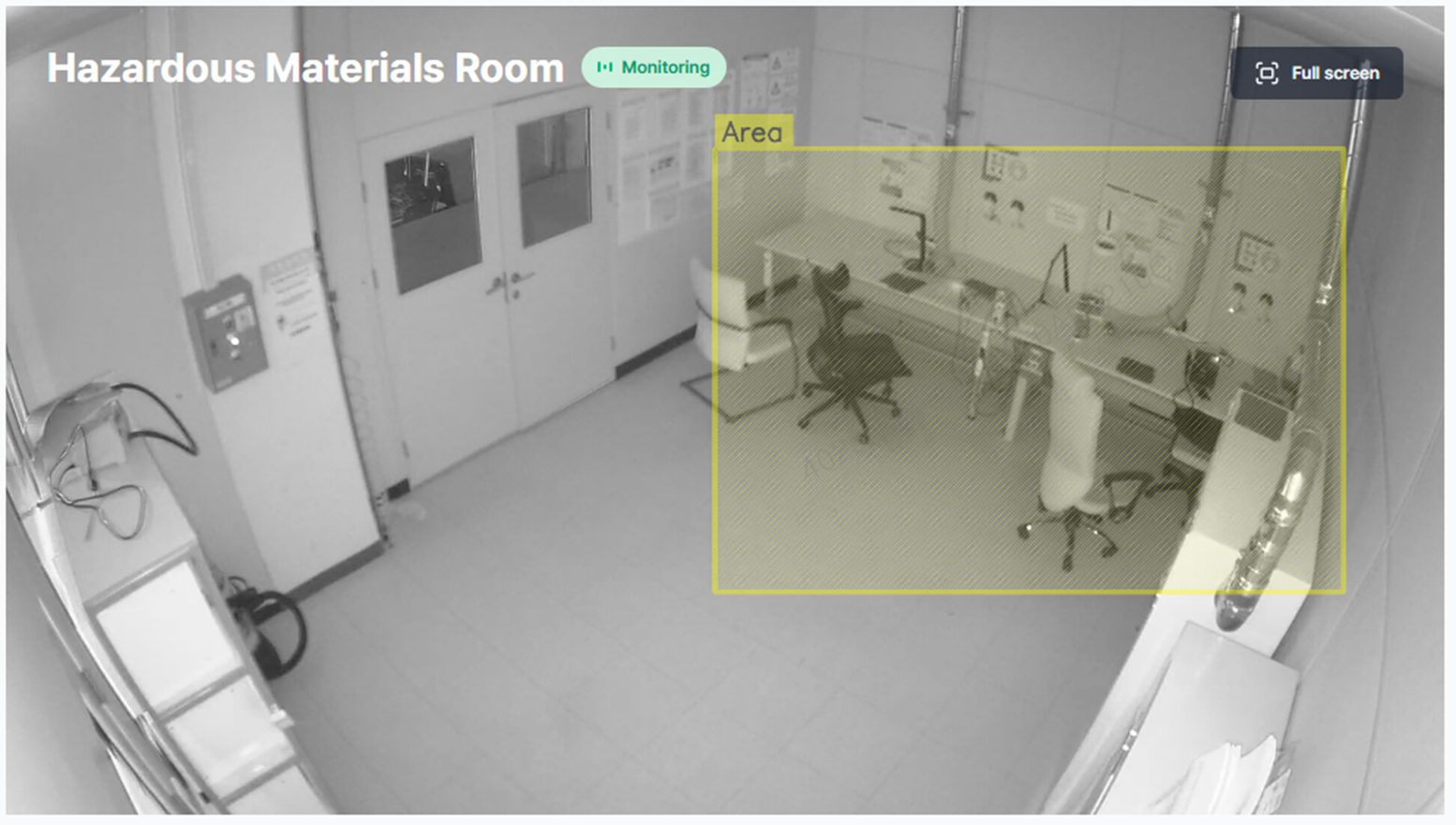
EVA v2.3.0부터 영역 기반 탐지 기능이 추가되었습니다.
사용자가 관심 영역을 지정하여 EVA가 해당 구역 내부만 집중적으로 분석하게 함으로써,
작업 구역 외부의 불필요한 움직임으로 인한 오탐을 효과적으로 줄일 수 있게 되었습니다.
EVA x Workflow 결합 : 탐지에서 대응까지
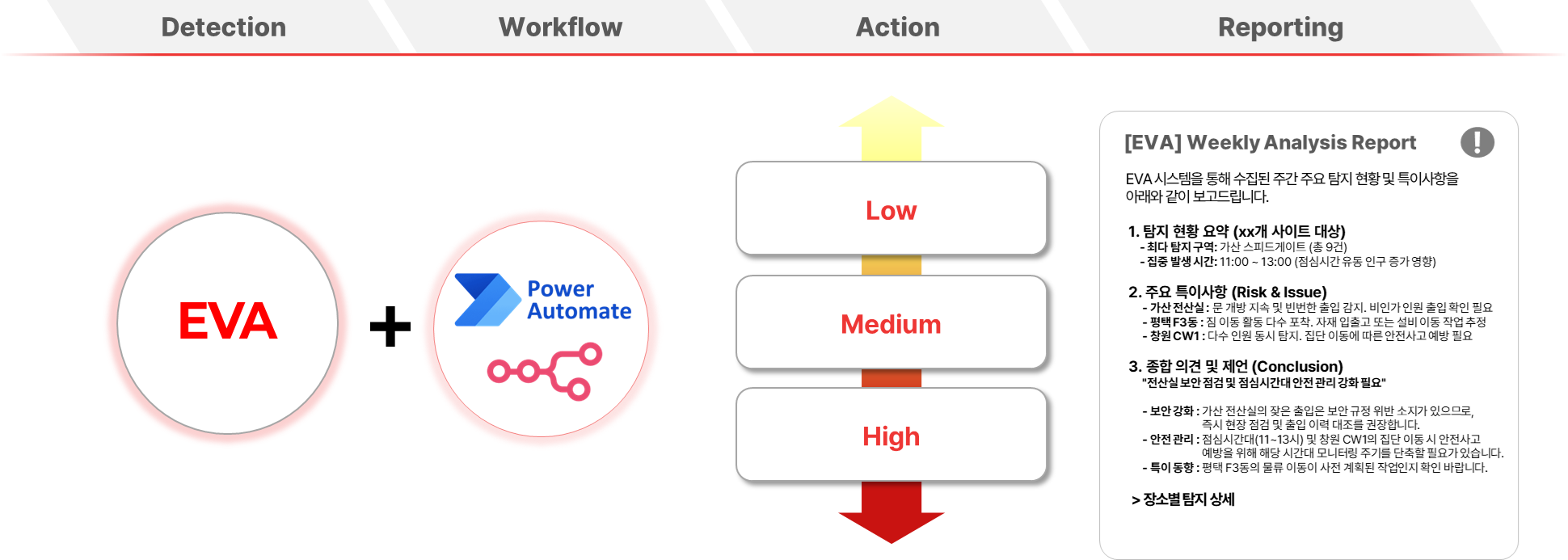
EVA의 탐지 결과는 Workflow Builder와 결합되어 실제 운영 액션으로 확장됩니다.
Power Automate나 n8n 등과의 연동을 통해 탐지 심각도에 따른 자동 대응 흐름을 구성할 수 있으며,
그 결과는 분석 리포트로 제공되어 관리자의 의사결정을 지원합니다.
EVA x Workflow 결합: 물리적 액션 연계
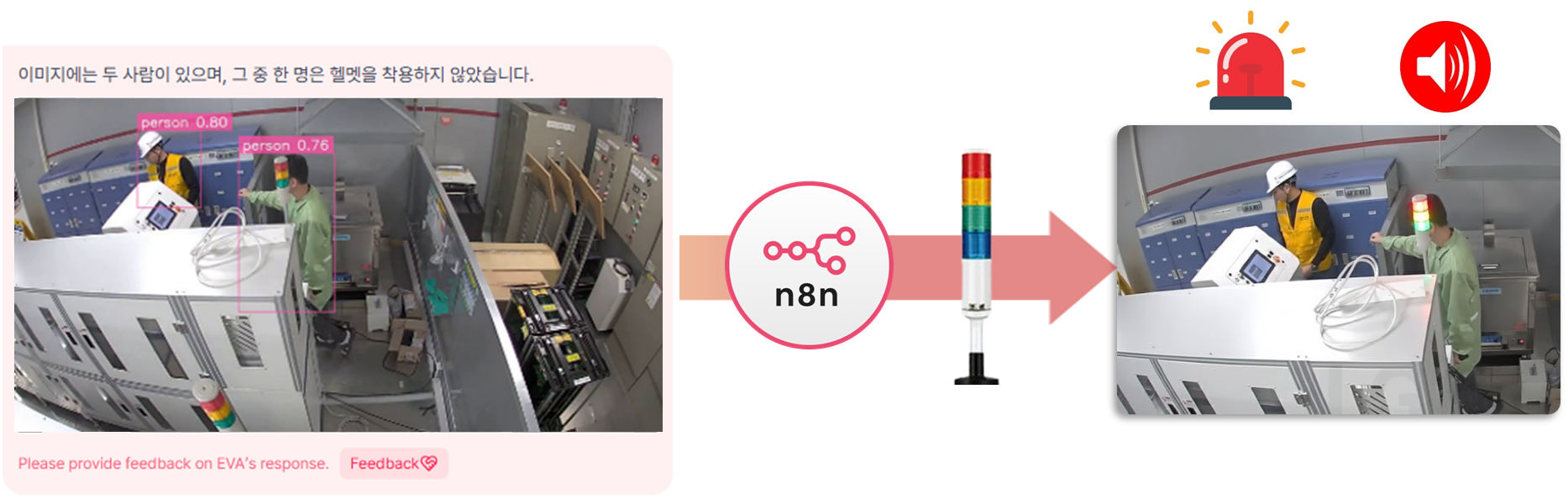
심각한 위험 상황이 탐지될 경우,
Workflow를 통해 현장의 사이렌, 비상등 등 물리적 장치를 즉시 제어할 수 있습니다.
이를 통해 EVA는 단순한 분석 도구를 넘어, 실제 현장의 행동을 유도하는 실행 중심의 안전 플랫폼으로 확장됩니다.
관련 내용은 Tech Blog에서 확인하실 수 있습니다.
효율적인 확장성
글로벌 스마트 카메라 업체와의 간단한 연동만으로, 클라우드 기반 확장성과 EVA의 유연한 탐지 운영을 동시에 확보할 수 있습니다.
이는 대규모 사업장에서도 경제적이고 효율적인 방식으로 지능형 안전 환경을 확장할 수 있는 기반을 제공합니다.

