
순찰로봇 및 사각지대 관제
고정형 CCTV의 한계를 넘어 지능형 순찰 체계로 움직이는 안전망을 구축합니다.
CCTV가 닿지 못한 곳, 그곳에서 사고는 시작됩니다
제조 현장은 오늘도 분주합니다. 컨베이어를 넘나드는 작업자, 교차로에서 휴대폰을 확인하는 직원, 그리고 카메라 영상 밖 — 바로 그 사각지대에서 작은 위험 신호들이 쌓여갑니다.
감시 화면 속에는 '사람'이 보이지만, 위험은 언제나 그 이면에서 조용히 자랍니다. 아무리 많은 CCTV를 설치해도, 그 시야는 결국 정지된 공간에 머무릅니다. 문제는 사람의 부재가 아니라, 시야의 한계였습니다.
EVA는 그 지점에서 출발했습니다. 고정된 감시 대신 '움직이며 관찰하는 시야', 단순히 '사람이 있다'를 인식하는 대신, '지금 위험이 형성되고 있다'는 맥락을 읽는 AI.
이 케이스는 EVA가 순찰로봇과 결합해 현장의 사각지대를 어떻게 실제 작동 가능한 안전 체계로 바꿔내고 있는지 보여주는 이야기입니다.
도입 배경: CCTV가 닿지 못한 곳, 그곳에서 사고는 시작됐다
제조 현장은 언제나 분주합니다. 컨베이어를 건너 넘어가는 작업자, 휴대폰을 보면서 교차로를 가로지르는 직원, 그리고 CCTV 화면이 닿지 않는 구간에서 예기치 않게 발생하는 작은 위험 신호들까지. 현장을 관리하는 입장에서는 가능한 한 모든 구역을 살피고 싶지만, 고정된 카메라만으로는 분명한 한계가 있었습니다.
특히 교차로 인근의 보행 중 휴대폰 사용, 보호구 미착용, LOTO 미실시와 같은 행위는 반복적으로 지적되는 대표적인 안전 이슈였습니다. 하지만 문제는 "알고 있다"는 것과 "제때 발견한다"는 것이 전혀 다르다는 점이었습니다. 모든 구역을 상시로 모니터링하기 어려운 현실 속에서, 안전 담당자들은 늘 같은 질문을 마주해야 했습니다.
더 많은 CCTV를 설치하는 방식만으로는 현장의 한계를 완전히 해결하기 어려웠고, 결국 답은 스스로 이동하면서 위험을 찾아내는 지능형 순찰 방식에 있었습니다.
해결의 실마리: 순찰로봇에 EVA를 더하다 (Why EVA?)
고객사는 EVA의 유연한 통합성과 시나리오 기반 탐지 구조에 주목했습니다. EVA는 단순히 영상을 분석하는 AI가 아니라, 현장의 다양한 환경과 목적에 맞춰 적용할 수 있는 탐지 플랫폼이었습니다. 이 점은 순찰로봇과 결합했을 때 특히 큰 의미를 가졌습니다. 정적인 감시를 넘어, 이동 중에도 필요한 지점에서 위험을 탐지��할 수 있는 구조를 만들 수 있었기 때문입니다.
또한 EVA는 RTSP 연동만으로 순찰로봇 카메라 영상과 연결할 수 있어, 사내 서버를 별도로 구축하지 않은 PoC 단계에서도 비교적 빠르게 검증을 시작할 수 있었습니다. 제조 현장처럼 운영 여건이 빠듯한 환경에서는, 복잡한 구축보다 적은 리소스로 빠르게 가능성을 확인할 수 있다는 점이 큰 장점이었습니다.
문제 해결의 과정: EVA는 이렇게 현장을 바꾸고 있다
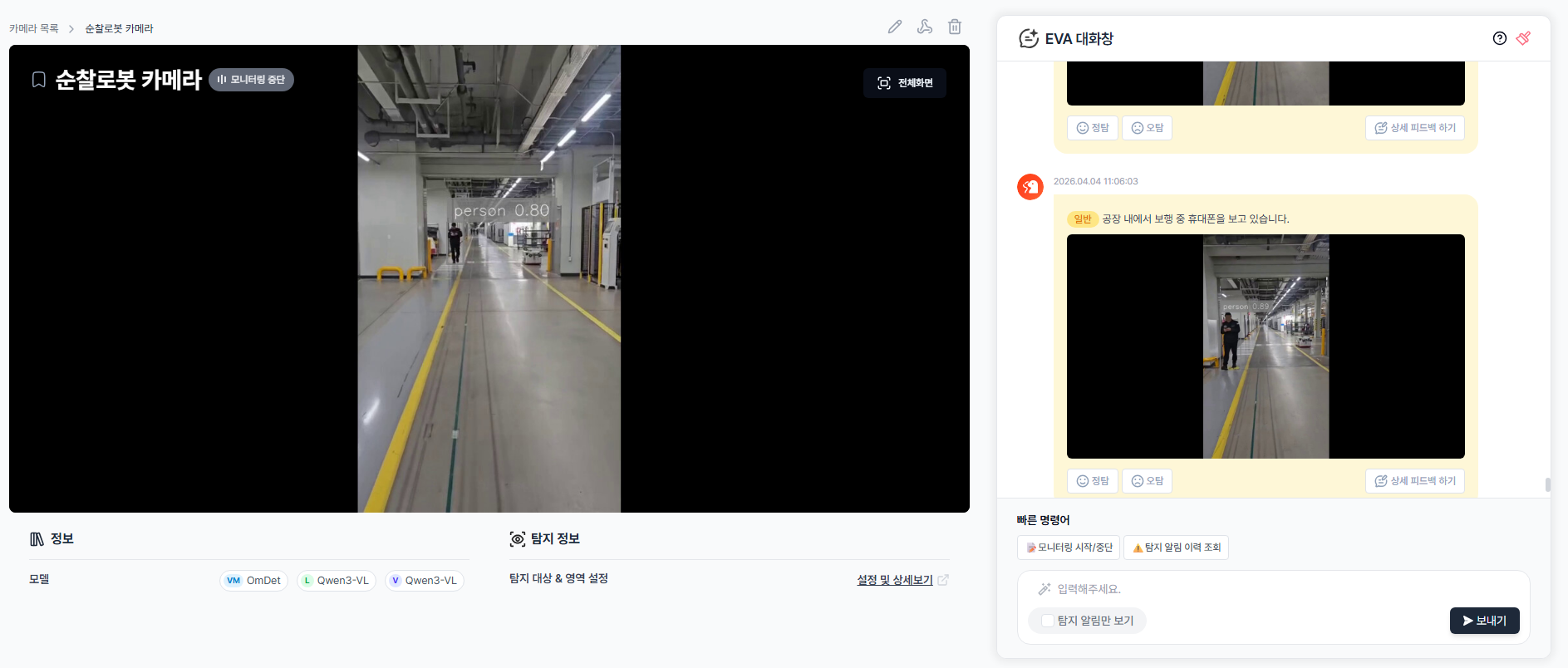
이번 PoC에서는 순찰로봇에 장착된 카메라 영상을 확보한 뒤, EVA가 이동형 카메라 환경에서도 안정적으로 탐지할 수 있는지를 중점적으로 확인했습니다. 특히 순찰로봇이 실제로 이동하는 상황에서 영상이 흔들리거나 구도가 달라질 수 있기 때문에, 고정형 CCTV와는 다른 조건에서도 탐지가 가능한지가 핵심 검증 포인트였습니다.
탐지 시나리오는 현장 안전관리 관점에서 실질적인 항목들로 구성되었습니다. 보행 중 휴대폰 사용, 컨베이어 무단횡단, LOTO 미실시 여부 확인, 보호구 미착용 탐지 등 현장에서 반복적으로 발생하거나 놓치기 쉬운 항목들을 중심으로 테스트가 진행되었습니다.
현재는 영상 기반 PoC 단계이지만, EVA가 이동형 카메라 환경에서도 탐지를 안정적으로 수행하는 모습은 실무진들에게 충분한 가능성을 보여주었습니다. 기존의 정적인 CCTV 중심 운영 체계가, 이제는 움직이는 순찰과 연동되는 스마트 안전 체계로 확장될 수 있다는 점을 확인한 것입니다.
EVA가 증��명한 가능성: 보이지 않던 위험이, 이제 눈에 들어온다
PoC를 통해 가장 크게 확인한 변화는, 그동안 "어쩔 수 없다"고 여겨졌던 사각지대에 다시 시선이 닿기 시작했다는 점입니다. CCTV가 비추지 못하는 구간은 본래 관리의 공백으로 남기 쉬웠지만, EVA가 탑재된 순찰로봇을 통해 그 구간도 탐지 대상이 될 수 있다는 가능성을 확인했습니다.
또한 EVA의 시나리오 기반 탐지가 안정적으로 동작하면서, 안전 담당자들은 보다 넓은 현장을 무작정 훑는 방식이 아니라, 핵심 리스크 구간을 중심으로 관리하는 구조를 상상할 수 있게 되었습니다. 이는 단순히 업무를 덜어주는 수준을 넘어, 예방 중심의 안전관리로 전환할 수 있는 출발점이 되었습니다.
향후 본 적용 단계에서는 순찰로봇이 EVA의 탐지 결과를 바탕으로 경광등, 알람, 디스플레이 경고, 관제센터 알림 등 후속 조치를 수행하는 형태로 확장될 수 있습니다. 즉, 단순히 "보는 AI"가 아니라, 현장의 변화를 이끄는 실행형 안전 시스템으로 발전할 가능성을 확인한 셈입니다.
당신의 현장에도, EVA의 시야가 필요하지 않나요?
당신의 공장에도 CCTV가 비추지 않는 구간이 있나요? 혹은 "여기는 늘 위험하지만, 상시 모니터링은 어렵다"는 고민을 안고 계신가요? EVA는 고정된 카메라로는 볼 수 없던 위험을 순찰로봇과 함께 움직이며 탐지하는 Physical AI 솔루션입니다.
지금 EVA PoC 사례와 데모를 통해, 당신의 현장에도 보이는 안전을 만들어보세요.

