
Patrol Robot & Blind Spot Monitoring
Building a moving safety net beyond the limits of fixed CCTVs with an intelligent patrol system.
Where CCTVs Could Not Reach, Accidents Began There
The manufacturing site is busy today as well. Workers crossing conveyors, employees checking mobile phones at intersections, and outside the camera video — right in those blind spots, small danger signals are piling up.
'People' are visible on the monitoring screen, but danger always grows quietly behind them. No matter how many CCTVs you install, their vision ultimately stays in a static space. The problem was not the absence of people, but the limit of vision.
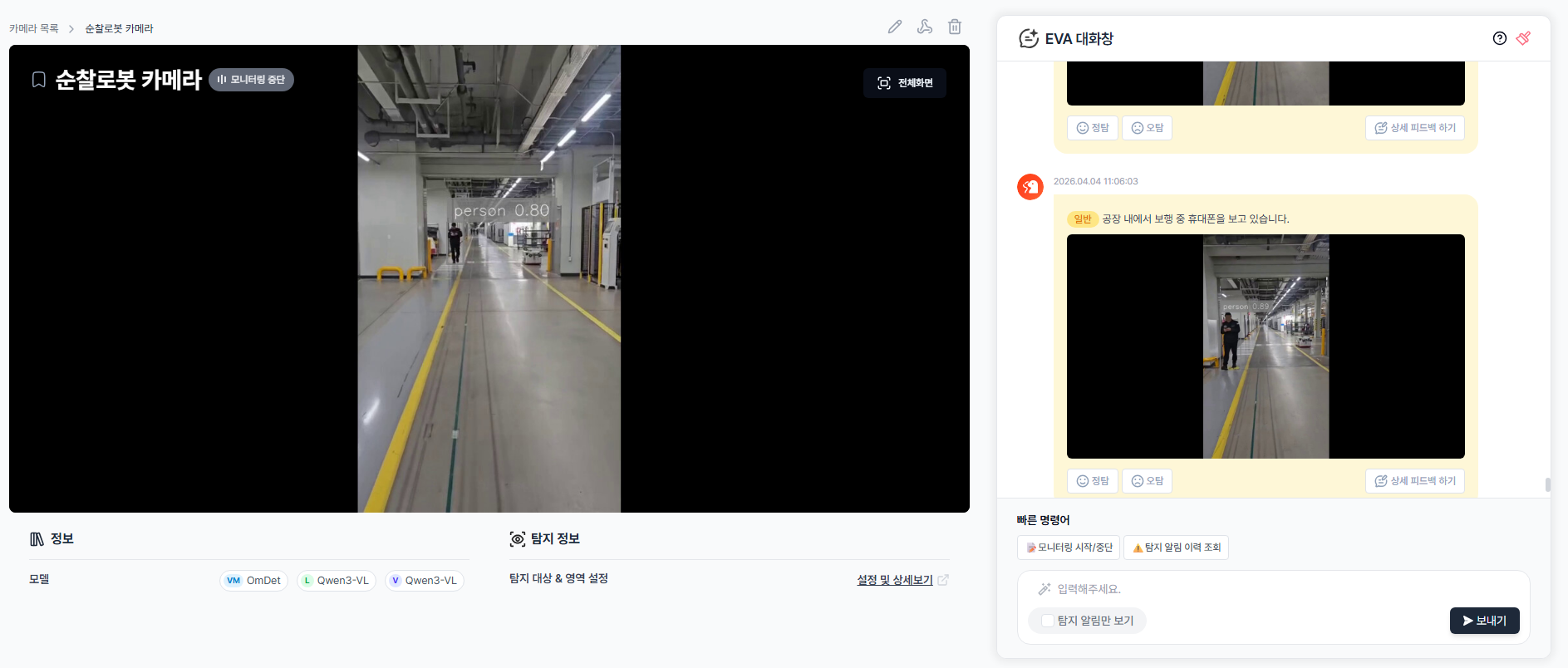
EVA started from that point. Instead of static monitoring, a 'vision that observes while moving', and instead of simply recognizing 'there is a person', an AI that reads the context that 'a danger is forming now'.
This case story shows how EVA is transforming blind spots in the field into an actually operable safety system in combination with patrol robots.
Background: Where CCTVs Could Not Reach, Accidents Began There
Manufacturing sites are always busy. Workers crossing conveyors, employees crossing intersections while looking at their phones, and even small danger signals that unexpectedly occur in sections that CCTV screens cannot reach. From the manager's perspective, they want to look at all possible areas, but fixed cameras have clear limits.
The method of installing more CCTVs alone could not completely solve the limits of the field, and ultimately, the answer lay in an intelligent patrol method that finds risks while moving on its own.
The Clue to the Solution: Adding EVA to Patrol Robots (Why EVA?)
The customer paid attention to EVA's flexible integration and scenario-based detection structure. EVA was not just an AI that analyzes videos, but a detection platform that can be applied to various environments and purposes in the field. This point took on a particularly large meaning when combined with patrol robots. Because it was possible to create a structure that could detect dangers at necessary points even while moving, beyond static monitoring.
In addition, EVA could be connected to patrol robot camera video with only RTSP integration, so it was possible to start verification relatively quickly even in the PoC stage where a separate in-house server was not built. In an environment with tight operating conditions like a manufacturing site, the big advantage was that possibilities could be quickly confirmed with fewer resources than complex construction.
The Process of Problem Solving: EVA is Changing the Field Like This
In this PoC, after securing the camera video mounted on the patrol robot, we focused on confirming whether EVA could detect stably even in a mobile camera environment. In particular, because the video can shake or the composition can change when the patrol robot actually moves, the key verification point was whether detection was possible even under conditions different from fixed CCTVs.
Detection scenarios consisted of practical items from the perspective of field safety management. Tests were conducted centered on items that occur repeatedly in the field or are easy to miss, such as using a mobile phone while walking, unauthorized conveyor crossing, LOTO non-implementation check, and non-wearing of protective equipment detection.
Currently, it is in the video-based PoC stage, but the way EVA performs detection stably even in a mobile camera environment showed sufficient possibilities to the practical staff. They confirmed that the existing static CCTV-centered operating system can now be expanded into a smart safety system linked with moving patrol.
The Possibilities Proved by EVA: Blind Risks Now Come into Sight
The biggest change confirmed through the PoC is that eyes began to reach blind spots that were previously considered "unavoidable." Sections not reflected by CCTV were originally easy to remain as management vacuums, but through patrol robots equipped with EVA, we confirmed the possibility that those sections could also become detection targets.
In addition, as EVA's scenario-based detection operated stably, safety managers were able to imagine a structure managed around core risk zones instead of blindly scanning a wide field. This went beyond simply reducing work and became a starting point for transitioning to prevention-centered safety management.
In the future main application stage, it can be expanded to a form where the patrol robot performs follow-up actions such as warning lights, alarms, display warnings, and control center notifications based on EVA's detection results. In other words, we confirmed the possibility of evolving into an executable safety system that leads changes in the field, not just an "AI that sees."
Does Your Site Need EVA's Vision Too?
Is there a section in your factory that CCTVs don't reflect? Or are you worried that "it's always dangerous here, but constant monitoring is difficult"? EVA is a Physical AI solution that detects risks that fixed cameras cannot see by moving together with patrol robots.
Through EVA PoC cases and demos, make visible safety at your site now.

