EVA로 구현하는 Physical AI

AI는 언제 현실에 개입할 수 있을까?
산업 현장에서 사고는 예고 없이 발생합니다. 사람이 쓰러지고, 팔이 설비에 끼이며, 화재가 발생하는 순간은 대부분 아주 짧은 시간 안에 일어납니다.
Physical AI는 이 순간을 인식하는 것에서 멈추지 않고, 현장의 물리적인 동작으로 이어질 수 있어야 합니다.
이번 글에서는 레고 기반 시뮬레이션을 통해 EVA가 사고를 어떻게 탐지하고, 그 판단이 실제 설비 동작으로 어떻게 연결되는지를 하나의 흐름으로 살펴봅니다.
레고로 단순화한 산업 현장 시뮬레이션
복잡한 산업 현장을 그대로 재현하는 대신, 레고를 활용해 사고 상황을 단순하게 구성했습니다.
사람이 쓰러지는 상황, 팔이 설비에 끼이는 상황, 화재가 발생하는 상황을 각각 독립적인 시나리오로 구성했습니다.
설비에 팔 끼임 시나리오 - 컨베이어 멈춤과 비상등 울림
쓰러짐 - 비상등와 부저 울림
화재 발생 - 컨베이어 멈춤과 비상등 울림
EVA: 상황을 이벤트로 해석하는 AI
이 시뮬레이션에서 중요한 것은 단순히 사람이 보이거나 불꽃이 감지되는 것이 아닙니다.
EVA는 각 상황을 사전에 정의된 탐지 시나리오로 해석하고, 이를 하나의 의미 있는 이벤트로 판단합니다.
아래는 EVA에서 탐지 시나리오를 구성하는 화면입니다.
탐지는 곧 다음 행동을 결정하는 트리거 조건이 됩니다.
Physical Action Trigger: AI 판단이 현실을 움직일 때
이벤트가 발생하면 EVA의 역할은 단순한 탐지에서 끝나지 않습니다.
EVA는 탐지된 이벤트를 Physical Action Trigger로 변환하여, 현장의 설비와 장치가 즉시 반응할 수 있도록 연결합니다.
이때 중요한 것은 각 사고 상황에 맞는 물리적 대응이 사전에 정의된 구조 안에서 실행된다는 점입니다. 사람의 개입을 기다리지 않고, AI의 판단이 곧바로 현실의 동작으로 이어집니다.
이러한 구조를 통해 AI의 판단은 화면 속 알림이나 로그로 남는 것이 아니라, 현장의 상태를 실제로 변화시키는 행동이 됩니다.
Physical Action Trigger는 AI가 ‘무엇을 보았는가’를 넘어, ‘현장에서 무엇이 달라져야 하는가’를 실행하는 지점입니다.
EVA → n8n → 설비 제어 워크플로우
이러한 Physical Action은 하드코딩된 로직이 아니라 워크플로우 기반으로 구성됩니다.
EVA에서 발생한 탐지 이벤트는 Webhook을 통해 n8n으로 전달되고, n8n은 이벤트의 중요도에 따라 Agent가 해당하는 설비 제어 시그널을 전송합니다.
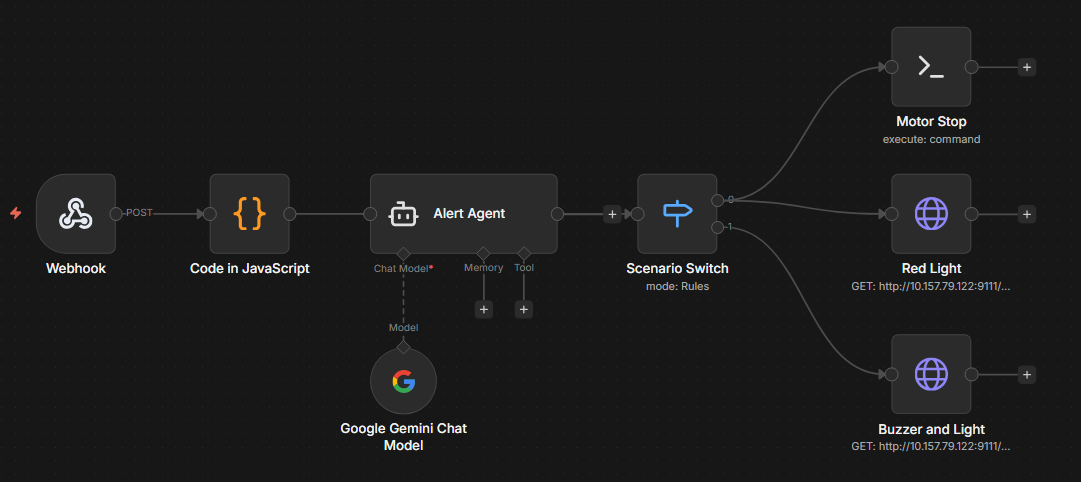
이 구조를 통해 설비가 변경되거나 시나리오가 확장되더라도 워크플로우를 유연하게 재사용할 수 있습니다.
Physical AI를 상상하게 만드는 구조
이번 레고 시뮬레이션은 실제 산업 현장을 그대로 재현한 것은 아닙니다.
하지만 사고가 발생하고, AI가 이를 인지하며, 판단이 물리적인 동작으로 이어지는 구조는 현장과 동일합니다.
EVA는 AI를 화면 속 결과로 남겨두지 않고, 현실 세계에 직접 개입하는 Physical AI를 실현합니다.

